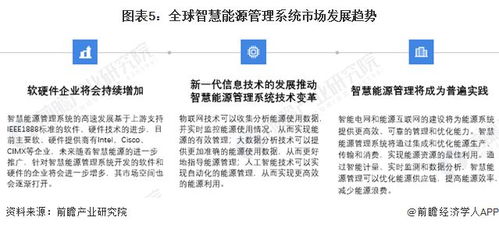
隨著全球能源轉型加速,智慧能源管理系統在2024年持續展現出強勁的市場增長勢頭。軟硬件技術的協同進步、物聯網的深度滲透、大數據的精準分析以及人工智能的智能決策,共同構成了推動市場發展的核心驅動力。其中,人工智能應用軟件的開發尤為關鍵,它不僅優化了能源分配效率,還實現了預測性維護和自適應控制。市場將更加聚焦于跨平臺集成、邊緣計算與云服務的融合,以及AI算法在能效優化中的創新應用,為全球可持續發展注入新動能。
2024年全球智慧能源管理系統市場發展概況及趨勢分析
如若轉載,請注明出處:http://m.lxsj.net.cn/product/15.html
更新時間:2026-06-03 03:38:48
產品列表
PRODUCT
----------------